
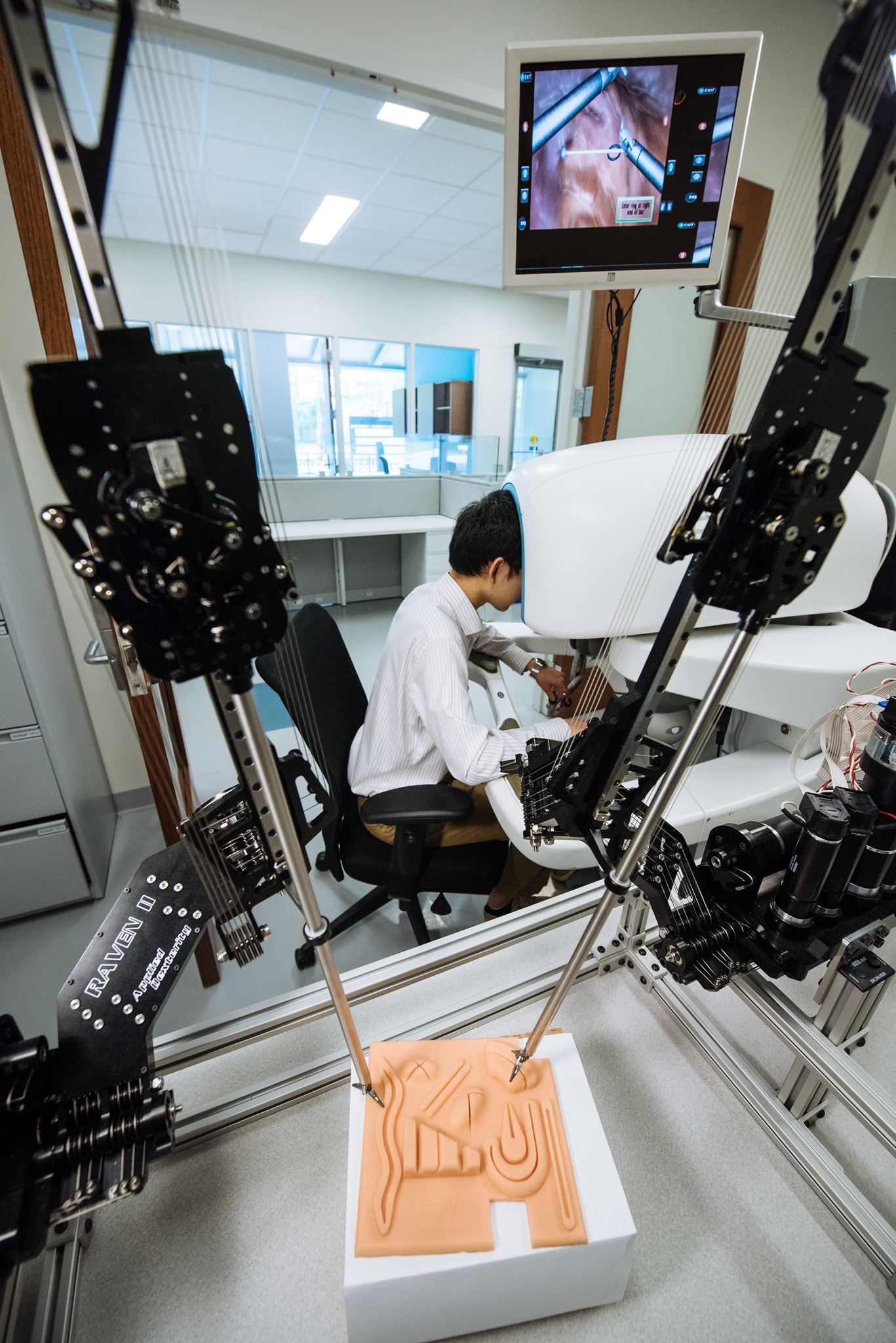
This project aims at engineering the next generation of telerobotic surgery training simulator. We use RAVEN II open source surgical platform as the basic software and hardware to develop upon with. Researchers from different research groups come together to conduct interdisciplinary research.
The simulator integrated with a physical engine and the RAVEN platform, the operators who get trained on this machine/simulator, the skills would be transferable to da Vinci Surgical System.
Research topics: robotics, dynamics and controls, network security for cyber physical system, fault injection

Researchers: Xiao Li, Homa Alemzadeh, Daniel Chen, Shankar Deka