spareek2@illinois.edu
Education
PhD Student, Systems Engineering, Department of Industrial and Enterprise Systems Engineering, UIUC, Urbana, IL
University at Buffalo, SUNY, Master of Science in Mechanical Engineering, Buffalo, NY, 2013-2015
Manipal Institute of Technology, Bachelor of Engineering, Manipal, India, 2009-2013
Research Interests
Machine learning, brain computer interfaces, human machine interactions, user interface design, haptics, robotics, design, additive manufacturing
About Me
I am a PhD student at the University of Illinois at Urbana Champaign. As an engineer and a researcher, my area of expertise and interest lies in the development of Intelligent and Self-Adapting Systems. I am proficient in computer programming and the use of design and analysis software. With a keen interest in engineering design and the medical domain, I have undertaken courses and projects aimed at integrating the two.
For my master thesis I explored and devised new cognitive metrics to measure mental workload and motor workload for stroke rehabilitation, using brain computer interfaces. I have experience in developing user interfaces and have explored the application of stereo vision cameras for the same. I am interested in the development of design tools that would make the existing computational design tools more useable for creative novice designers in the conceptual design phase.
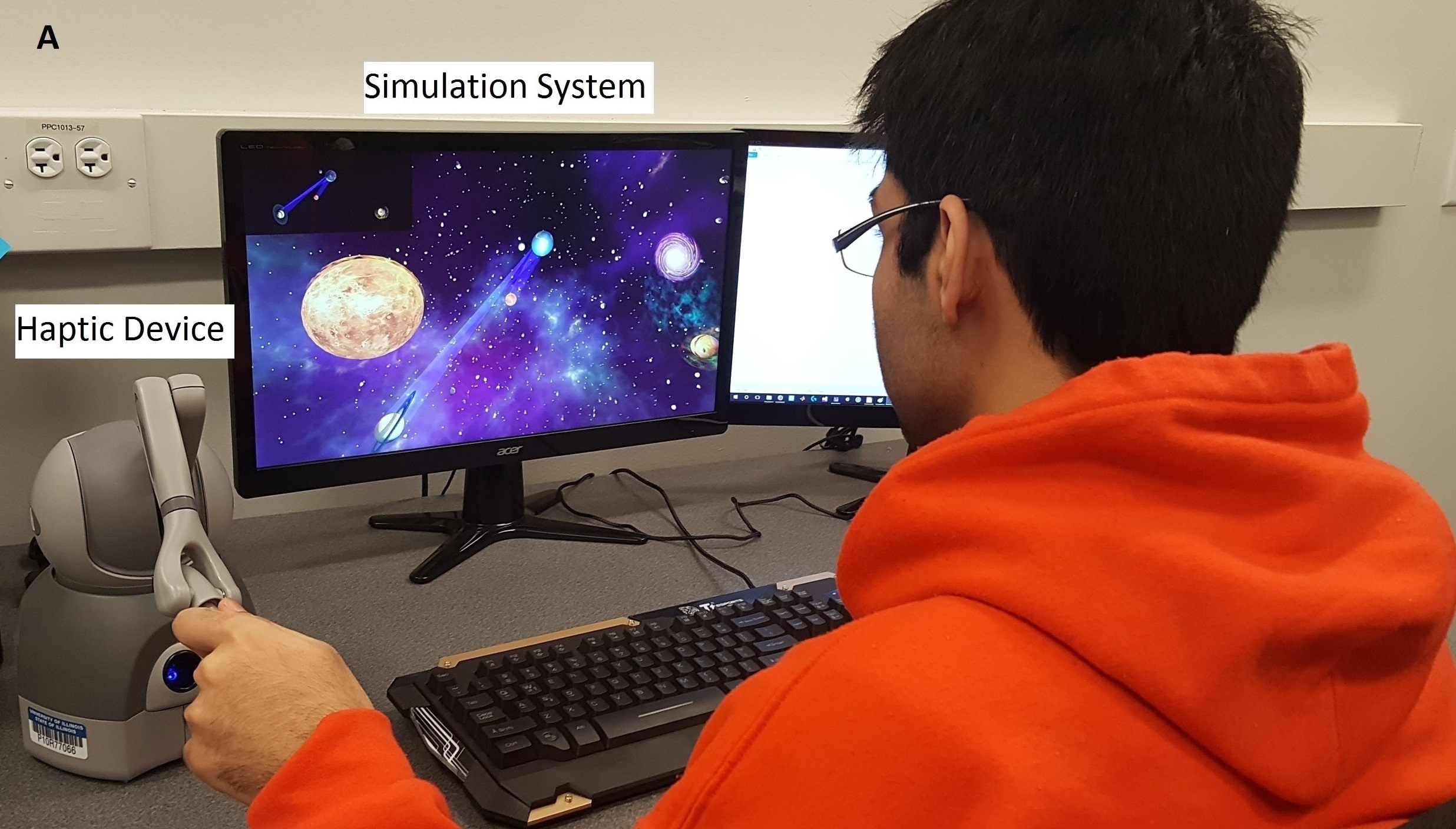
Currently, I am working on the development of an adaptive home-centered rehabilitation therapy system for stroke patients. The proposed system would be a haptic based system that would adapt the force feedback on the basis of the patient’s mental engagement (using BCI) and the patient’s response to therapy. The research focuses on the development of fine motor skills of stroke patients, particularly those required to perform activities of daily living (ADL).
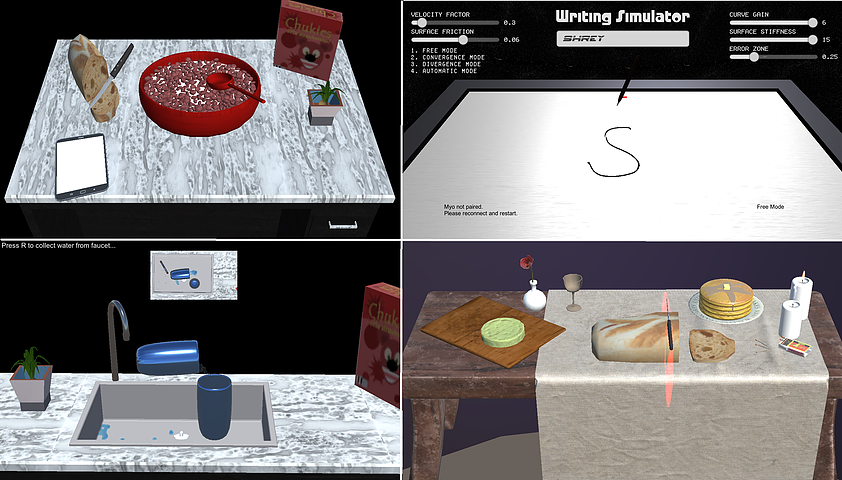
Maintaining patient engagement is a key challenge in any rehabilitation paradigm. In conventional hospital-centric therapy, the therapist ensures patient engagement and motivation towards therapy. In robotic rehabilitation, this human chaperone is absent. We are trying quantify the patient’s mental engagement levels as they perform therapy and adapt the system accordingly. We are using EEG, EMG and the patient’s interaction with the robot itself as parameters for this quantification. In order to make therapy engaging, we have developed a set of games to simulate therapy exercises. The system is targeted towards stroke patients. The current implementation involves a straight line following game, a handwriting simulator, an eating task, a pouring task and a cutting task. Finally, we are implementing machine learning algorithms towards the realization of a intelligent therapist, that can deliver therapy at home.