
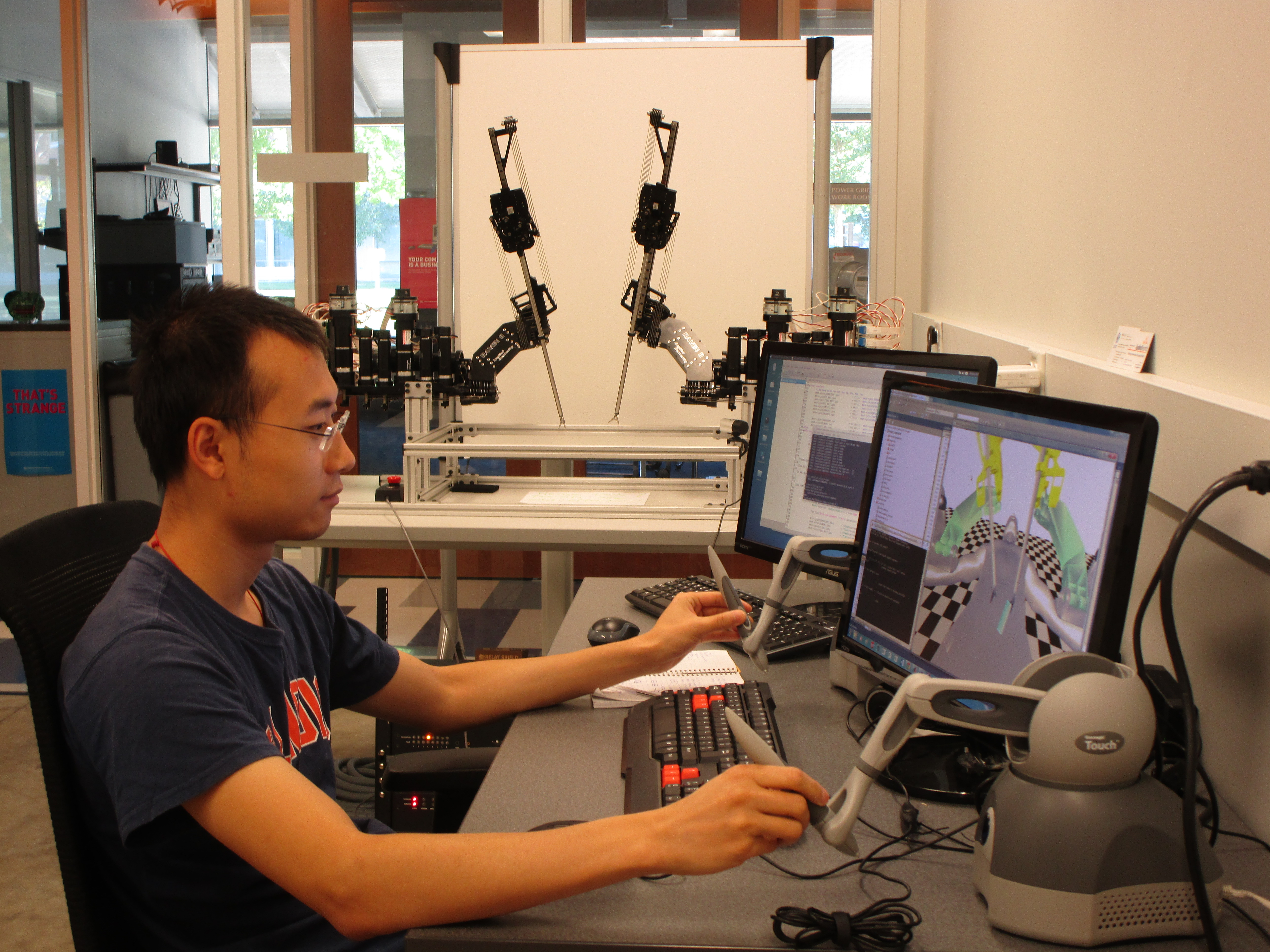
A Novel Hardware-in-the-loop Robotic Surgery Training Platform
This research is aiming at building a state-of-the-art platform for surgeons training, utilizing VR technologies and RAVEN II surgical robot.
Research areas include: dynamics and control of robotic manipulator, control with time delays, network communication, computer graphics, system programming
Human Augmented Surgical Robotic System
We aim to assist surgeons using an augmented robotic device for interventional procedure.